Forza controelettromotrice del motore sincrono a magnete permanente
1. Come viene generato il campo elettromagnetico di ritorno?
La generazione della forza controelettromotrice è facile da comprendere. Il principio è che il conduttore interseca le linee di forza magnetiche. Finché c'è moto relativo tra i due, il campo magnetico può essere stazionario e il conduttore lo interseca, oppure il conduttore può essere stazionario e il campo magnetico si muove.
Nei motori sincroni a magneti permanenti, le bobine sono fissate sullo statore (conduttore) e i magneti permanenti sono fissati sul rotore (campo magnetico). Quando il rotore ruota, il campo magnetico generato dai magneti permanenti sul rotore ruota e viene interrotto dalle bobine sullo statore, generando una forza controelettromotrice nelle bobine. Perché si chiama forza controelettromotrice? Come suggerisce il nome, la direzione della forza controelettromotrice E è opposta alla direzione della tensione ai terminali U (come mostrato in Figura 1).
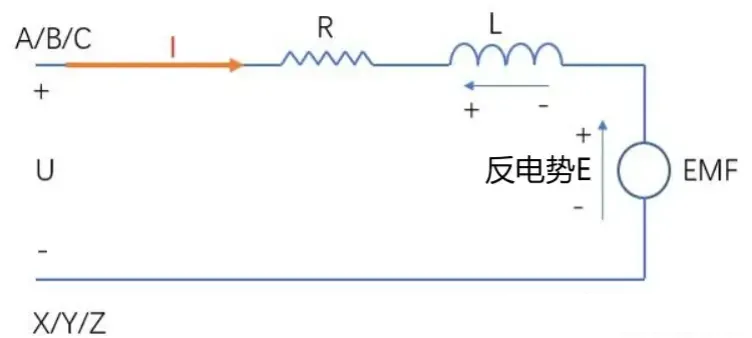
Figura 1
2. Qual è la relazione tra la forza controelettromotrice e la tensione terminale?
Dalla Figura 1 si può osservare che la relazione tra la forza controelettromotrice e la tensione terminale sotto carico è:
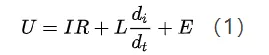
La prova della forza controelettromotrice viene generalmente eseguita a vuoto, senza corrente e a una velocità di 1000 giri/min. Generalmente, il valore di 1000 giri/min è definito come coefficiente di forza controelettromotrice = valore medio della forza controelettromotrice/velocità. Il coefficiente di forza controelettromotrice è un parametro importante del motore. È importante notare che la forza controelettromotrice sotto carico varia costantemente prima che la velocità si stabilizzi. Dalla formula (1), possiamo sapere che la forza controelettromotrice sotto carico è inferiore alla tensione ai terminali. Se la forza controelettromotrice è maggiore della tensione ai terminali, diventa un generatore e genera tensione all'esterno. Poiché la resistenza e la corrente nel lavoro effettivo sono piccole, il valore della forza controelettromotrice è approssimativamente uguale alla tensione ai terminali ed è limitato dal valore nominale della tensione ai terminali.
3. Il significato fisico della forza controelettromotrice
Immaginate cosa accadrebbe se la forza controelettromotrice non esistesse? Dall'equazione (1), possiamo vedere che senza la forza controelettromotrice, l'intero motore equivale a un resistore puro, diventando un dispositivo che genera molto calore, il che contrasta la conversione dell'energia elettrica in energia meccanica da parte del motore. Nell'equazione di conversione dell'energia elettrica ,UIt è l'energia elettrica in ingresso, come l'energia elettrica in ingresso a una batteria, un motore o un trasformatore; I2Rt è l'energia di dispersione termica in ciascun circuito, che è un tipo di energia di dispersione termica, più piccola è, meglio è; la differenza tra l'energia elettrica in ingresso e l'energia elettrica di dispersione termica, è l'energia utile corrispondente alla forza elettromotrice posteriore
,UIt è l'energia elettrica in ingresso, come l'energia elettrica in ingresso a una batteria, un motore o un trasformatore; I2Rt è l'energia di dispersione termica in ciascun circuito, che è un tipo di energia di dispersione termica, più piccola è, meglio è; la differenza tra l'energia elettrica in ingresso e l'energia elettrica di dispersione termica, è l'energia utile corrispondente alla forza elettromotrice posteriore In altre parole, la forza controelettromotrice viene utilizzata per generare energia utile ed è inversamente proporzionale alla perdita di calore. Maggiore è l'energia dispersa, minore è l'energia utile ottenibile. Oggettivamente parlando, la forza controelettromotrice consuma energia elettrica nel circuito, ma non si tratta di una "perdita". La parte di energia elettrica corrispondente alla forza controelettromotrice verrà convertita in energia utile per le apparecchiature elettriche, come l'energia meccanica dei motori, l'energia chimica delle batterie, ecc.
In altre parole, la forza controelettromotrice viene utilizzata per generare energia utile ed è inversamente proporzionale alla perdita di calore. Maggiore è l'energia dispersa, minore è l'energia utile ottenibile. Oggettivamente parlando, la forza controelettromotrice consuma energia elettrica nel circuito, ma non si tratta di una "perdita". La parte di energia elettrica corrispondente alla forza controelettromotrice verrà convertita in energia utile per le apparecchiature elettriche, come l'energia meccanica dei motori, l'energia chimica delle batterie, ecc.
Da ciò si evince che l'entità della forza controelettromotrice indica la capacità dell'apparecchiatura elettrica di convertire l'energia totale in ingresso in energia utile, che riflette il livello di capacità di conversione dell'apparecchiatura elettrica.
4. Da cosa dipende l'entità della forza controelettromotrice?
La formula per il calcolo della forza controelettromotrice è: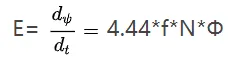
E è la forza elettromotrice della bobina, ψ è il flusso magnetico, f è la frequenza, N è il numero di spire e Φ è il flusso magnetico.
Sulla base della formula sopra, credo che chiunque possa probabilmente indicare alcuni fattori che influenzano l'entità della forza controelettromotrice. Ecco un articolo riassuntivo:
(1) La forza controelettromotrice (EMF) è uguale alla velocità di variazione del flusso magnetico. Maggiore è la velocità, maggiore è la velocità di variazione e maggiore è la forza controelettromotrice (EMF).
(2) Il flusso magnetico stesso è uguale al numero di spire moltiplicato per il flusso magnetico di una singola spira. Pertanto, maggiore è il numero di spire, maggiore è il flusso magnetico e maggiore è la forza controelettromotrice.
(3) Il numero di spire è correlato allo schema di avvolgimento, come la connessione stella-triangolo, il numero di spire per slot, il numero di fasi, il numero di denti, il numero di rami paralleli e lo schema a passo pieno o a passo corto.
(4) Il flusso magnetico a singola spira è uguale alla forza magnetomotrice divisa per la resistenza magnetica. Pertanto, maggiore è la forza magnetomotrice, minore è la resistenza magnetica nella direzione del flusso magnetico e maggiore è la forza controelettromotrice.
(5) La resistenza magnetica è correlata al traferro e al coordinamento polo-fessura. Maggiore è il traferro, maggiore è la resistenza magnetica e minore è la forza elettromotrice di ritorno. Il coordinamento polo-fessura è più complesso e richiede un'analisi specifica.
(6) La forza magnetomotrice è correlata al magnetismo residuo del magnete e all'area efficace del magnete. Maggiore è il magnetismo residuo, maggiore è la forza controelettromotrice (EMF). L'area efficace è correlata alla direzione di magnetizzazione, alle dimensioni e al posizionamento del magnete e richiede un'analisi specifica.
(7) Il magnetismo residuo è correlato alla temperatura. Maggiore è la temperatura, minore è la forza elettromotrice posteriore.
In sintesi, i fattori che influiscono sulla forza controelettromotrice includono la velocità di rotazione, il numero di giri per slot, il numero di fasi, il numero di rami paralleli, il passo completo e il passo corto, il circuito magnetico del motore, la lunghezza del traferro, l'adattamento polo-slot, il magnetismo residuo dell'acciaio magnetico, il posizionamento e le dimensioni dell'acciaio magnetico, la direzione della magnetizzazione dell'acciaio magnetico e la temperatura.
5. Come selezionare la dimensione della forza controelettromotrice nella progettazione del motore?
Nella progettazione di un motore, la forza controelettromotrice (E) è molto importante. Se la forza controelettromotrice è ben progettata (dimensioni appropriate, bassa distorsione della forma d'onda), il motore è efficiente. La forza controelettromotrice ha diversi effetti importanti sul motore:
1. L'entità della forza controelettromotrice determina il punto magnetico debole del motore, e il punto magnetico debole determina la distribuzione della mappa dell'efficienza del motore.
2. Il tasso di distorsione della forma d'onda del campo elettromagnetico posteriore influisce sulla coppia di ripple del motore e sulla fluidità della coppia in uscita quando il motore è in funzione.
3. L'entità della forza controelettromotrice determina direttamente il coefficiente di coppia del motore, e il coefficiente della forza controelettromotrice è proporzionale al coefficiente di coppia.
Da ciò si possono ricavare le seguenti contraddizioni nella progettazione del motore:
a. Quando la forza controelettromotrice è elevata, il motore può mantenere una coppia elevata al limite di corrente del controller nell'area di funzionamento a bassa velocità, ma non può generare coppia ad alta velocità e non può nemmeno raggiungere la velocità prevista;
b. Quando la forza controelettromotrice è piccola, il motore ha ancora capacità di uscita nell'area ad alta velocità, ma la coppia non può essere raggiunta con la stessa corrente del controller a bassa velocità.
6. L'impatto positivo del campo elettromagnetico posteriore sui motori a magneti permanenti.
L'esistenza della forza controelettromotrice (FEM) è molto importante per il funzionamento dei motori a magneti permanenti. Può apportare alcuni vantaggi e funzioni speciali ai motori:
a. Risparmio energetico
La forza controelettromotrice generata dai motori a magnete permanente può ridurre la corrente del motore, riducendo così la perdita di potenza, riducendo le perdite di energia e raggiungendo l'obiettivo del risparmio energetico.
b. Aumentare la coppia
La forza controelettromotrice (FEM) è opposta alla tensione di alimentazione. All'aumentare della velocità del motore, aumenta anche la forza controelettromotrice. La tensione inversa riduce l'induttanza dell'avvolgimento del motore, con conseguente aumento della corrente. Ciò consente al motore di generare una coppia aggiuntiva e di migliorarne le prestazioni.
c. Decelerazione inversa
Dopo che il motore a magnete permanente perde potenza, a causa dell'esistenza della forza controelettromotrice (EMF), può continuare a generare flusso magnetico e far continuare a ruotare il rotore, il che forma l'effetto della velocità inversa della forza controelettromotrice, molto utile in alcune applicazioni, come macchine utensili e altre apparecchiature.
In breve, la forza controelettromotrice (CEM) è un elemento indispensabile dei motori a magneti permanenti. Offre numerosi vantaggi ai motori a magneti permanenti e svolge un ruolo fondamentale nella progettazione e nella produzione di motori. L'entità e la forma d'onda della FEM dipendono da fattori quali la progettazione, il processo di fabbricazione e le condizioni d'uso del motore a magneti permanenti. L'entità e la forma d'onda della FEM hanno un'influenza significativa sulle prestazioni e sulla stabilità del motore.
Anhui Mingteng Permanent Magnet Electromechanical Equipment Co., Ltd. (https://www.mingtengmotor.com/)è un produttore professionale di motori sincroni a magneti permanenti. Il nostro centro tecnico conta oltre 40 addetti alla ricerca e sviluppo, suddivisi in tre dipartimenti: progettazione, processo e collaudo, specializzati nella ricerca e sviluppo, nella progettazione e nell'innovazione di processo dei motori sincroni a magneti permanenti. Utilizzando software di progettazione professionali e programmi di progettazione specifici per motori a magneti permanenti sviluppati internamente, durante il processo di progettazione e produzione del motore, le dimensioni e la forma d'onda della forza controelettromotrice saranno attentamente considerate in base alle esigenze effettive e alle specifiche condizioni di lavoro dell'utente, per garantire le prestazioni e la stabilità del motore e migliorarne l'efficienza energetica.
Copyright: questo articolo è una ristampa del numero pubblico di WeChat “电机技术及应用”, il collegamento originale https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
Questo articolo non rappresenta le opinioni della nostra azienda. Se avete opinioni o punti di vista diversi, vi preghiamo di correggerci!
Data di pubblicazione: 20 agosto 2024